Working with our SciBorg ‘Eleanor’
1. After downloading the necessary libraries to begin running our Sciborg my partner Hanna and I began learning how to control Eleanor’s movements though increasingly sophisticated code.
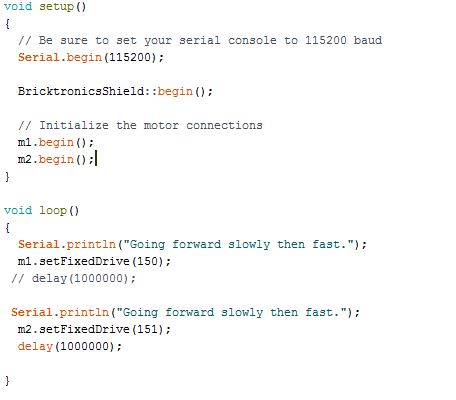
Two motors, One speed:

Minimum Speed: The minimum value Hanna and I were able to implement in our code while still causing Eleanor to move was 86.

Hard Turn:
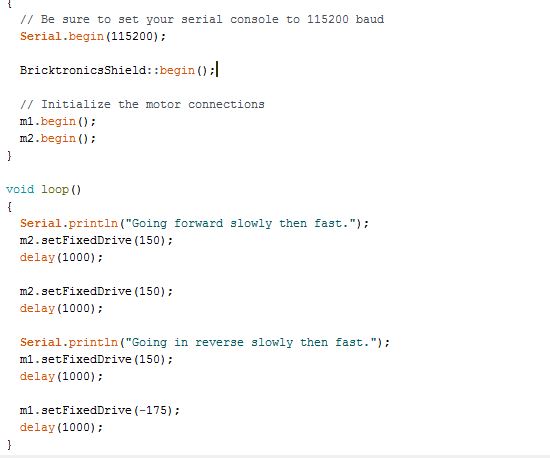
Gentle Turn:

10 Feet: This script took us a while, first Eleanor stopped about a half foot over the line due to us not considering that the wheels would not come to a hard stop. When we adjusted the code we overcompensated so Eleanor was a foot short of meeting the line. After a bit of adjusting we were able to find the perfect amount of time to give so that the wheels slow stop landed right at the line.

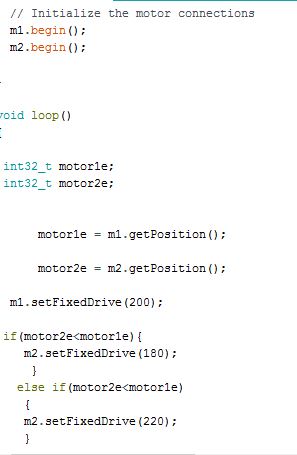
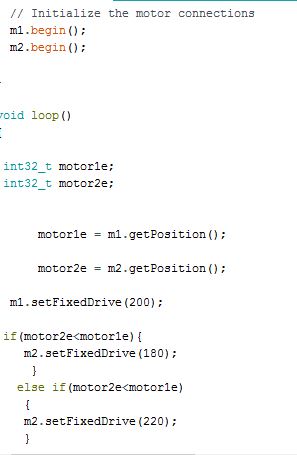
2. Next Hanna and I began to incorporate Eleanor’s sensors. By using feedback we were able to code for more possibilities, leading to more exciting movement.
Motor Encoder: In theory the motor position should reset so that Eleanor returns to the exact starting position. However, when the code says go forward for one second and go backwards for one second what actually occurs does not place Eleanor back into the same exact ‘0’ position. After one second the motor does not come to a complete an instantaneous stop because there are no breaks, this discrepancy explains why the hypothetical is not the actual. We found that the discrepancy was so large that if the process repeated for a couple of minutes Eleanor would eventually turn in a full circle.
Touch Switch:

Light Sensor: Getting the light sensor to work took a lot of tries, we found the range to be 0-100 in our exploring. The light sensor was a level of accuracy only helpful when paired with a good code. Without very exact specifications in the code the accuracy was not good enough to serve our purpose. During our trials we tested the LED light but found that it caused the serial monitor to exclusively read ’97’. Lowering our light sensor however was very helpful, we lowered it as much as it cold be slid down on the Sciborg. By lowering our light sensor we found that the range widened, calling the white of the tape 90 and the brown of the wood board 45.
Proportional Control (Go 10 Feet):
Drive Straight:
Drive Straighter:
Link to video of Eleanor driving straight: https://drive.google.com/open?id=0BwVnrIlLiQe3bkhDSmdIQUFKSU0
Follow Line Using Bang-Bang:
Link to video of Eleanor following the line: https://drive.google.com/open?id=0BwVnrIlLiQe3dXUzRzFtV2hHRms
