Upgrading from working on just the Arduino to learning to code for the SciBorgs was very challenging, though it taught me a lot. Even though both Drew and I did not have a very extensive background in coding, we learned a lot from each other.
Both Motors: We were asked to write a code to run both of the motors at the same speed.

Arduino program for both motors running at the same speed
Minimum Speed: We were then asked to find out what was the slowest a SciBorg could possibly run, without stalling or staying still.

Arduino program for slowest possible SciBorg
Hard Turn: We were asked to program the Arduino to make a harsh turn, with one motor moving and the other stalled.

Arduino program for hard turn
Gentler Turn: Similar to the hard turn, but with moth motors moving, just not at the same speed

Arduino program for gentler turn
Moving 10 Feet: We were asked to write a code so that the SciBorg would move 10 feet and then stop by itself. We did this by timing how long the SciBorg would take to travel 10 feet, then wrote a code that would tell it to move for that specific amount of time.
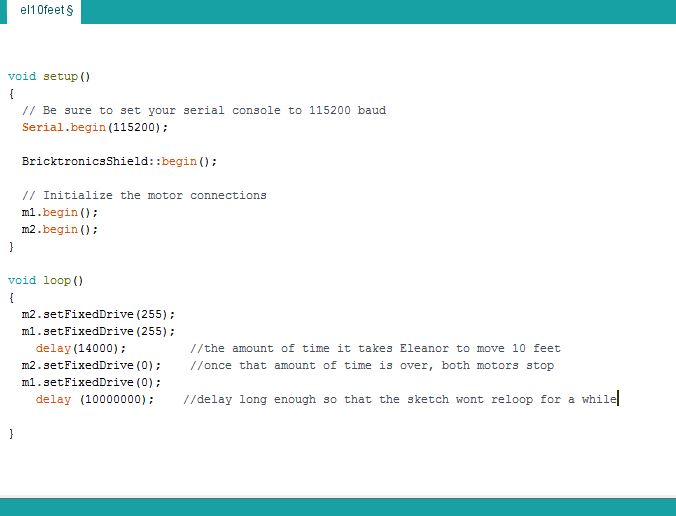
Arduino program for moving 10 feet
Motor Encoder: The motor encoder program was supposed to make it so that the SciBorg would turn in one direction, then turn back exactly at the same speed so that it would return to its initial position, however, that is not what we observed with our SciBorg. Our SciBorg would not turn back the full distance, so every time it turned, it would move slightly farther, and eventual make a full round.
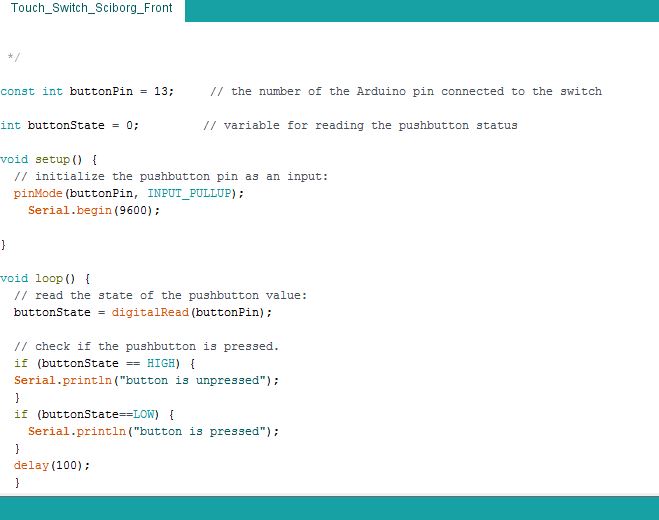
Touch Switch:
Light Sensor: With the light sensor, we detected the different numerical values that would be read based on whether the light sensor was scanning the wooden (or whatever the table toppers are made of) boards or the white tape. The white tape would read around 90, while the boards would read around 45. We found out that we had the most accurate readings when we lowered the light sensor so that it was just barely lifted above the table.
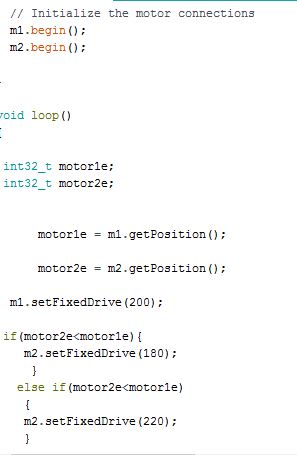
Drive Straight: We tried to write a program that would be able to tell how many rotations the motor was spinning, and if the motors were not rotating the same amount, to then increase the speed of one of them.

Arduino program to drive straight (Bang Bang)
Drive Straighter: This time we tried to get the SciBorg to move straight using a proportional control.
Arduino program to drive straight (proportional control)
Link to video of Eleanor driving straight: https://drive.google.com/open?id=0BwVnrIlLiQe3bkhDSmdIQUFKSU0
Follow White Line Using Bang-Bang:
Link to video of Eleanor following the line: https://drive.google.com/open?id=0BwVnrIlLiQe3dXUzRzFtV2hHRms
